It was difficult wiring them together as both sensors require the GND and 5V pins on the Arduino. However, thanks to my friend, I learned that I can use the breadboard to help wire them in a series.
Basically, it's where you use one end of the jumper wire to connect to the GND pin on the Arduino Uno for example. Then you'd connect the other end to the GND pin on the accelerometer. Then using a space on the breadboard in the same row as the GND pin of the accelerometer, place the end of a second jumper wire. The other end of that second jumper wire will go into the GND pin of the gyroscope. It'd be best to place the end of the second jumper wire in a space directly next to the one of the accelerometer. However, if it's any space of that row, it should technically work the same.

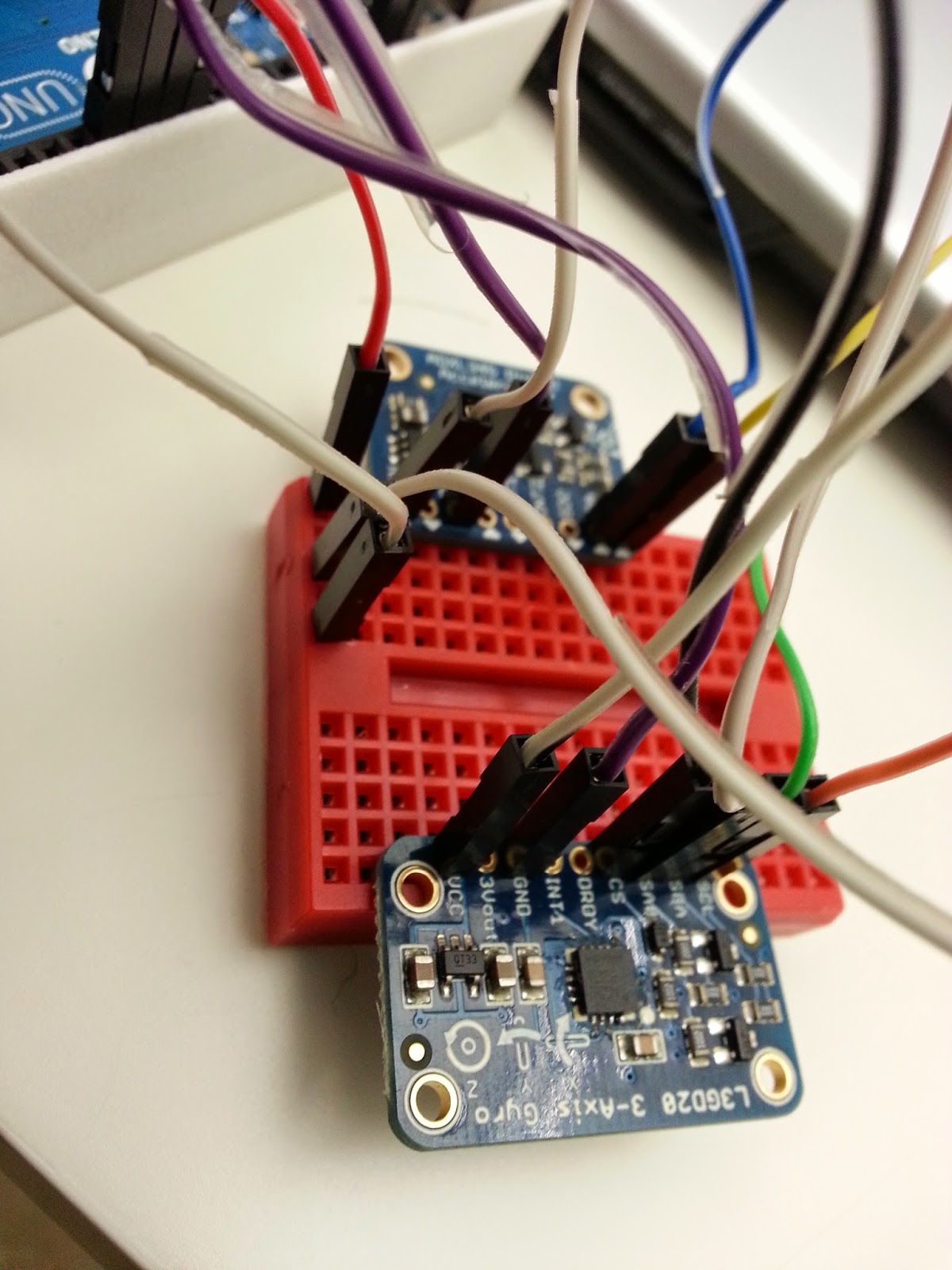 In the photo to the right, you can see how I connected the wires in a row.
In the photo to the right, you can see how I connected the wires in a row.The photo to the left shows just the general view of all the wires I used to connect the pins.
I didn't solder anything. Was going to save that until the end.
So yea, that was one cool and usefull trick I learned!
Anyways, here's the code I used:
#include#include #include #include #include // Define the pins for SPI #define GYRO_CS 4 // labeled CS #define GYRO_DO 5 // labeled SA0 #define GYRO_DI 6 // labeled SDA #define GYRO_CLK 7 // labeled SCL Adafruit_L3GD20 gyro(GYRO_CS, GYRO_DO, GYRO_DI, GYRO_CLK); /* Assign a unique ID to this sensor at the same time */ Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345); //Declaring timer SimpleTimer timer; void displaySensorDetails(void) { sensor_t sensor; accel.getSensor(&sensor); Serial.println("------------------------------------"); Serial.print ("Sensor: "); Serial.println(sensor.name); Serial.print ("Driver Ver: "); Serial.println(sensor.version); Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id); Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" m/s^2"); Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" m/s^2"); Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" m/s^2"); Serial.println("------------------------------------"); Serial.println(""); delay(500); } void displayDataRate(void) { Serial.print ("Data Rate: "); switch(accel.getDataRate()) { case ADXL345_DATARATE_3200_HZ: Serial.print ("3200 "); break; case ADXL345_DATARATE_1600_HZ: Serial.print ("1600 "); break; case ADXL345_DATARATE_800_HZ: Serial.print ("800 "); break; case ADXL345_DATARATE_400_HZ: Serial.print ("400 "); break; case ADXL345_DATARATE_200_HZ: Serial.print ("200 "); break; case ADXL345_DATARATE_100_HZ: Serial.print ("100 "); break; case ADXL345_DATARATE_50_HZ: Serial.print ("50 "); break; case ADXL345_DATARATE_25_HZ: Serial.print ("25 "); break; case ADXL345_DATARATE_12_5_HZ: Serial.print ("12.5 "); break; case ADXL345_DATARATE_6_25HZ: Serial.print ("6.25 "); break; case ADXL345_DATARATE_3_13_HZ: Serial.print ("3.13 "); break; case ADXL345_DATARATE_1_56_HZ: Serial.print ("1.56 "); break; case ADXL345_DATARATE_0_78_HZ: Serial.print ("0.78 "); break; case ADXL345_DATARATE_0_39_HZ: Serial.print ("0.39 "); break; case ADXL345_DATARATE_0_20_HZ: Serial.print ("0.20 "); break; case ADXL345_DATARATE_0_10_HZ: Serial.print ("0.10 "); break; default: Serial.print ("???? "); break; } Serial.println(" Hz"); } void displayRange(void) { Serial.print ("Range: +/- "); switch(accel.getRange()) { case ADXL345_RANGE_16_G: Serial.print ("16 "); break; case ADXL345_RANGE_8_G: Serial.print ("8 "); break; case ADXL345_RANGE_4_G: Serial.print ("4 "); break; case ADXL345_RANGE_2_G: Serial.print ("2 "); break; default: Serial.print ("?? "); break; } Serial.println(" g"); } int led = 13; //int times = 0; //int last_Value =0; void setup() { Serial.begin(9600); // Try to initialise and warn if we couldn't detect the chip while (!gyro.begin(gyro.L3DS20_RANGE_250DPS)) { Serial.println("Oops ... unable to initialize the L3GD20. Check your wiring!"); // while (1); } Serial.begin(9600); Serial.println("Accelerometer Test"); Serial.println(""); pinMode(led, OUTPUT); /* Initialise the sensor */ while(!accel.begin()) { /* There was a problem detecting the ADXL345 ... check your connections */ Serial.println("Ooops, no ADXL345 detected ... Check your wiring!"); } /* Set the range to whatever is appropriate for your project */ accel.setRange(ADXL345_RANGE_4_G); // displaySetRange(ADXL345_RANGE_8_G); // displaySetRange(ADXL345_RANGE_16_G); // displaySetRange(ADXL345_RANGE_2_G); /* Display some basic information on this sensor */ displaySensorDetails(); /* Display additional settings (outside the scope of sensor_t) */ displayDataRate(); displayRange(); Serial.println(""); timer.setInterval(1000, breath); timer.setInterval(20000, breathChk); } void loop() { gyro.read(); Serial.print("gX: "); Serial.print((int)gyro.data.x); Serial.print(" "); Serial.print("gY: "); Serial.print((int)gyro.data.y); Serial.print(" "); Serial.print("gZ: "); Serial.println((int)gyro.data.z); Serial.print(" "); delay(100); //int new_value = 0; //times = times + 1; //Serial.print(times); /* Get a new sensor event */ sensors_event_t event; accel.getEvent(&event); /* Display the results (acceleration is measured in m/s^2) */ Serial.print("aX: "); Serial.print(event.acceleration.x); Serial.print(" "); Serial.print("aY: "); Serial.print(event.acceleration.y); Serial.print(" "); Serial.print("aZ: "); Serial.print(event.acceleration.z); Serial.print(" ");Serial.println("m/s^2 "); delay(500); timer.run(); // last_value != new_value // MOVEMENT // last_value = new_value }
BY THE WAY.
I have stopped using Arduino as the basis of my Intel project. Instead, I will be using Texas Instrument's Sensor Tag product.
No comments:
Post a Comment